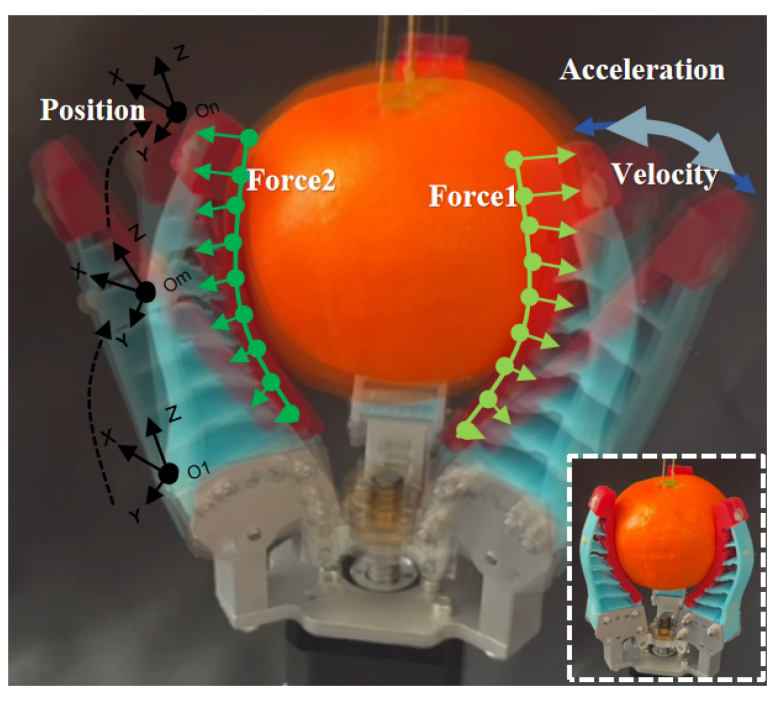
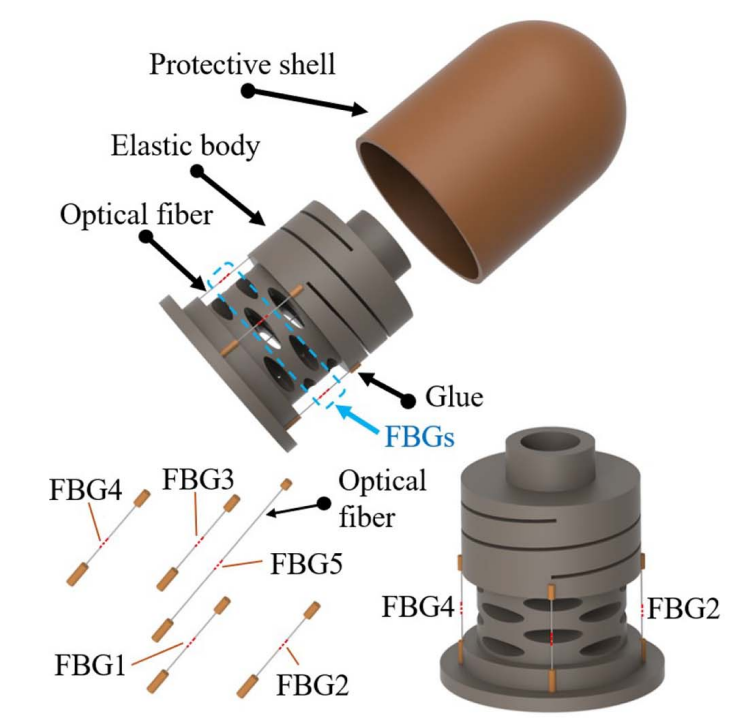
@article{10926497,author={Liang, Qiaokang and Deng, Zhanjin and Long, Jianyong and Wenxing, Xiao and Peng, Jianqing and Pan, Xingfang and Ren, Haiyan and Wang, Yaonan},journal={IEEE Transactions on Instrumentation and Measurement},title={FBG-FT-IMU: Multimodal Measurement System for Acupuncture Manipulation},year={2025},volume={74},number={},pages={1-10},keywords={Acupuncture;Sensors;Force measurement;Force;Needles;Fiber gratings;Torque measurement;Torque;Kinematics;Force sensors;Acupuncture manipulation;fiber Bragg grating (FBG);force/torque sensors;inertial measurement unit (IMU);multimodal measurement},doi={10.1109/TIM.2025.3551443},}
TIM
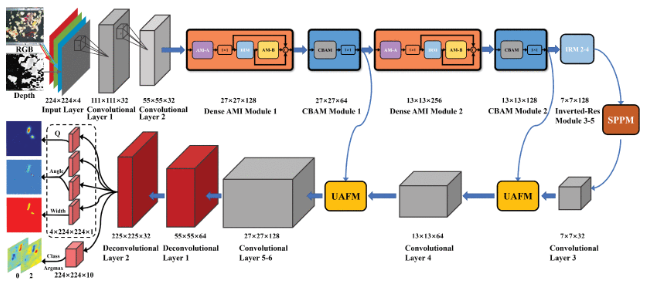
An Efficient Generative Intelligent Multiobjective Grasping Model for Kitchen Waste Sorting
Songyun Deng, Ruiyuan Pei, Li Zhou, and 3 more authors
IEEE Transactions on Instrumentation and Measurement, 2025
@article{10945475,author={Deng, Songyun and Pei, Ruiyuan and Zhou, Li and Qin, Hai and Sun, Wei and Liang, Qiaokang},journal={IEEE Transactions on Instrumentation and Measurement},title={An Efficient Generative Intelligent Multiobjective Grasping Model for Kitchen Waste Sorting},year={2025},volume={74},number={},pages={1-10},keywords={Grasping;Belts;Robots;Sorting;Annotations;Computational modeling;Accuracy;Planning;Robot kinematics;Object detection;Embedded AI;generative network;kitchen waste sorting;multiobject grasping;RGB-D dataset},doi={10.1109/TIM.2025.3555698},}
TIM
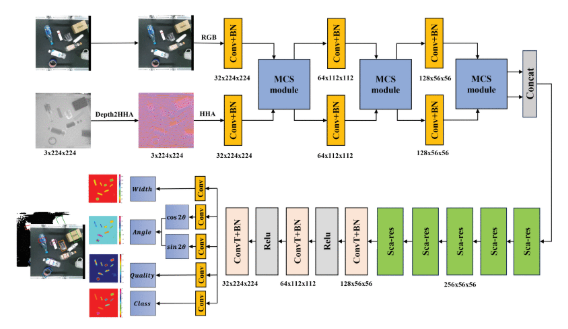
MCS-ResNet: A Generative Robot Grasping Network Based on RGB-D Fusion
Ruiyuan Pei, Songyun Deng, Li Zhou, and 2 more authors
IEEE Transactions on Instrumentation and Measurement, 2025
@article{10816048,author={Pei, Ruiyuan and Deng, Songyun and Zhou, Li and Qin, Hai and Liang, Qiaokang},journal={IEEE Transactions on Instrumentation and Measurement},title={MCS-ResNet: A Generative Robot Grasping Network Based on RGB-D Fusion},year={2025},volume={74},number={},pages={1-12},keywords={Grasping;Robots;Accuracy;Robot kinematics;Robot vision systems;Waste materials;Shape;Cameras;Solid modeling;Grippers;Generative network;grasp;grasp detection;RGB and Depth (RGB-D) dataset;RGB-D fusion;robot},doi={10.1109/TIM.2024.3522430},}
2024
TMECH
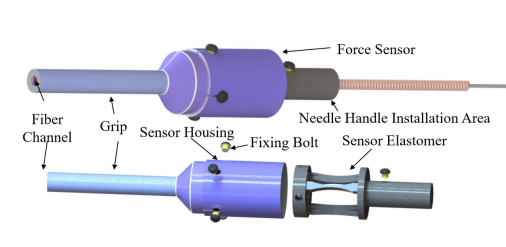
A Novel Fiber Bragg Grating Three-Dimensional Force Sensor for Medical Robotics
Qiaokang Liang, Songtao Ouyang, Jianyong Long, and 2 more authors
@article{10557466,author={Liang, Qiaokang and Ouyang, Songtao and Long, Jianyong and Zhou, Li and Zhang, Dan},journal={IEEE/ASME Transactions on Mechatronics},title={A Novel Fiber Bragg Grating Three-Dimensional Force Sensor for Medical Robotics},year={2024},volume={},number={},pages={1-11},keywords={Robot sensing systems;Force;Force sensors;Springs;Deformation;Sensitivity;Medical robotics;Fiber Bragg Grating (FBG);medical robots;structure self-decoupling;three-dimensional (3-D) force sensor},doi={10.1109/TMECH.2024.3408427},}
TIM
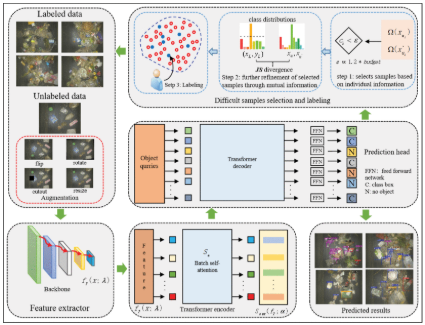
Active Learning-DETR: Cost-Effective Object Detection for Kitchen Waste
Hai Qin, Liye Shu, Li Zhou, and 6 more authors
IEEE Transactions on Instrumentation and Measurement, 2024
@article{10443710,author={Qin, Hai and Shu, Liye and Zhou, Li and Deng, Songyun and Xiao, Haihua and Sun, Wei and Liang, Qiaokang and Zhang, Dan and Wang, Yaonan},journal={IEEE Transactions on Instrumentation and Measurement},title={Active Learning-DETR: Cost-Effective Object Detection for Kitchen Waste},year={2024},volume={73},number={},pages={1-15},keywords={Sorting;Object detection;Robots;Transformers;Plastic products;Visualization;Training;Active learning (AL);kitchen waste images;object detection;robotic sorting;transformer},doi={10.1109/TIM.2024.3368494},}
TAI
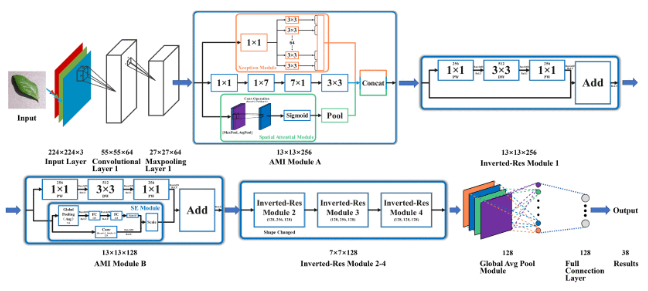
Efficient Real-Time Recognition Model of Plant Diseases for Low-Power Consumption Platform
Songyun Deng, Wanneng Wu, Kunlin Zou, and 3 more authors
IEEE Transactions on Artificial Intelligence, 2024
@article{10227525,author={Deng, Songyun and Wu, Wanneng and Zou, Kunlin and Qin, Hai and Cheng, Lekai and Liang, Qiaokang},journal={IEEE Transactions on Artificial Intelligence},title={Efficient Real-Time Recognition Model of Plant Diseases for Low-Power Consumption Platform},year={2024},volume={5},number={5},pages={2040-2054},keywords={Plant diseases;Training;Computational modeling;Deep learning;Computer architecture;Real-time systems;Image recognition;AMI-NanoNet;ensemble learning;Jetson Nano;lightweight network;plant disease identification},doi={10.1109/TAI.2023.3307662},}
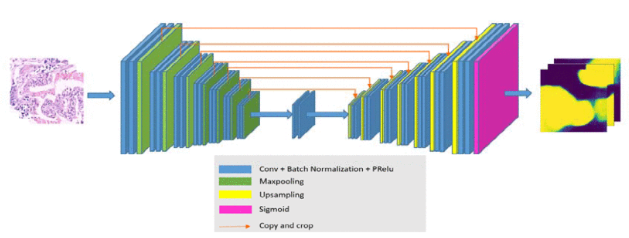
@article{8394987,author={Liang, Qiaokang and Nan, Yang and Coppola, Gianmarc and Zou, Kunglin and Sun, Wei and Zhang, Dan and Wang, Yaonan and Yu, Guanzhen},journal={IEEE Journal of Biomedical and Health Informatics},title={Weakly Supervised Biomedical Image Segmentation by Reiterative Learning},year={2019},volume={23},number={3},pages={1205-1214},keywords={Image segmentation;Biomedical imaging;Cancer;Training;Biological system modeling;Machine learning;Object segmentation;Reiterative learning;gastric histopathology;deep neural networks;biomedical image segmentation},doi={10.1109/JBHI.2018.2850040},}
2018
Calibration and decoupling of multi-axis robotic Force/Moment sensors
Qiaokang Liang, Wanneng Wu, Gianmarc Coppola, and 4 more authors
Robotics and Computer-Integrated Manufacturing, Apr 2018
Multi-axis robotic Force/Moment (F/M) sensors are capable of simultaneously detecting multiple components of force (Fx, Fy, and Fz), as well as the moments (Mx, My and Mz). This enables them to be frequently used in many robotic applications. Accurate, time-effective calibration and decoupling procedures are critical to the implementation of these sensors. This paper compares the effectiveness of decoupling methods based on Least-Squares (LS), BP Neural Network (BPNN), and Extreme Learning Machine (ELM) methods for improving the performance of multi-axis robotic F/M sensors. In order to demonstrate the effectiveness of the decoupling methods, a calibration and decoupling experiment was performed on a five-axis robotic F/M sensor. The experiments demonstrate that the ELM based decoupling method is superior to LS and BPNN based methods. The presented theoretical and experimental demonstrations provide a comprehensive description of the calibration and decoupling procedures of multi-axis robotic F/M sensors. This work reveals that the ELM method is an appropriate and high performing decoupling procedure for multi-axis robotic F/M sensors.
@article{LIANG2018301,title={Calibration and decoupling of multi-axis robotic Force/Moment sensors},journal={Robotics and Computer-Integrated Manufacturing},volume={49},pages={301-308},year={2018},issn={0736-5845},doi={https://doi.org/10.1016/j.rcim.2017.08.008},url={https://www.sciencedirect.com/science/article/pii/S0736584516301867},author={Liang, Qiaokang and Wu, Wanneng and Coppola, Gianmarc and Zhang, Dan and Sun, Wei and Ge, Yunjian and Wang, Yaonan},keywords={Robotic sensory system, Multi-axis Force/Moment sensors, Calibration and decoupling, Extreme Learning Machine},dimensions={true},}
ICIA
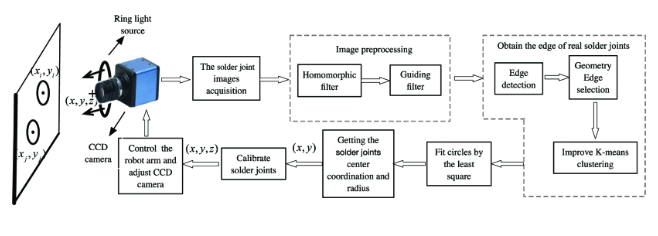
Adaptive Detection Scheme for Solder Joints Based on Guided Image Filtering and Geometrical Edge Selection
Qiaokang Liang, Jing jin, Jianyong Long, and 4 more authors
In 2018 IEEE International Conference on Information and Automation (ICIA), Apr 2018
@inproceedings{8812567,author={Liang, Qiaokang and jin, Jing and Long, Jianyong and Sun, Wei and Cai, Juan and Xia, Xiaohu and Zhang, Guangbing},booktitle={2018 IEEE International Conference on Information and Automation (ICIA)},title={Adaptive Detection Scheme for Solder Joints Based on Guided Image Filtering and Geometrical Edge Selection},year={2018},volume={},number={},pages={1042-1047},keywords={Image edge detection;Soldering;Interference;Calibration;Inspection;Clustering algorithms;Image filtering;Solder joint;the homomorphic filtering;the guidance image filtering;geometrical edges selection;K-means clustering},doi={10.1109/ICInfA.2018.8812567},}
WCICA
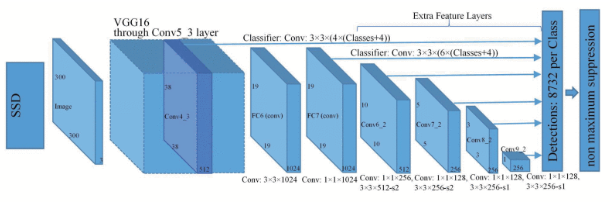
Apple recognition based on Convolutional Neural Network Framework
Qiaokang Liang, Jianyong Long, Wei Zhu, and 2 more authors
In 2018 13th World Congress on Intelligent Control and Automation (WCICA), Apr 2018
@inproceedings{8630705,author={Liang, Qiaokang and Long, Jianyong and Zhu, Wei and Wang, Yaonan and Sun, Wei},booktitle={2018 13th World Congress on Intelligent Control and Automation (WCICA)},title={Apple recognition based on Convolutional Neural Network Framework},year={2018},volume={},number={},pages={1751-1756},keywords={Feature extraction;Convolution;Robots;Object detection;Training;Task analysis;Real-time systems},doi={10.1109/WCICA.2018.8630705},}