IROS2025学术会议
多模态感知小组研究登上 IROS 2025!
✨ 两项成果入选国际顶级机器人会议 IEEE/RSJ IROS 2025
2025 年 IEEE/RSJ 智能机器人与系统国际会议(IROS 2025)于 10 月 20 日在中国杭州召开。作为全球机器人领域最具影响力的会议之一,IROS 2025 汇聚了来自世界各地的顶尖团队与前沿成果。会议期间,团队多模态感知小组博士生 欧阳松涛 和 肖文星 分别分享了研究成果。

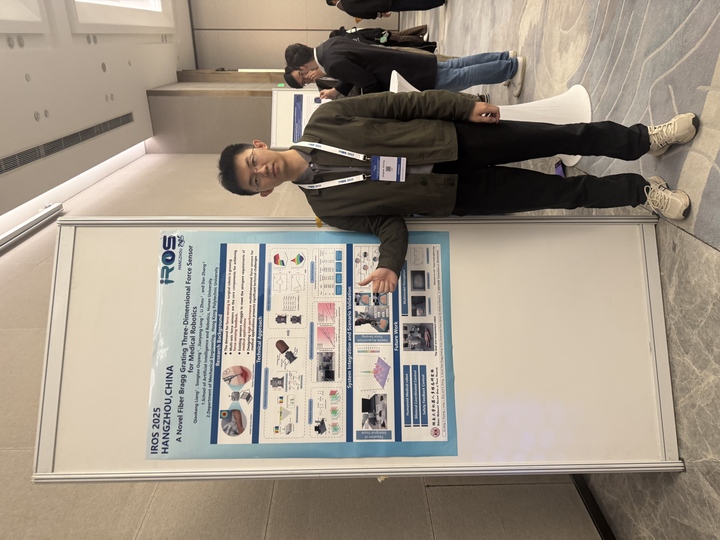
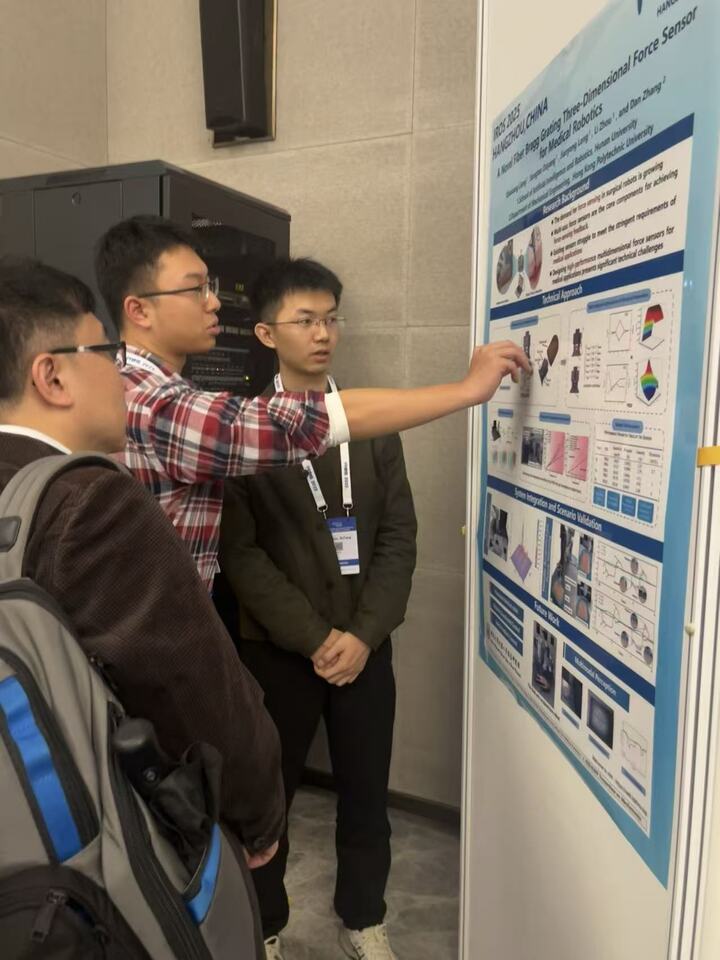
报告 1️⃣:A Novel Fiber Bragg Grating Three-Dimensional Force Sensor for Medical Robotics
汇报人:欧阳松涛
🔹 核心贡献
- 🌟 提出一种基于光纤布拉格光栅(FBG)的新型三维力传感器
- ⚡ 高灵敏度、抗干扰、可微创集成
- 🏥 为医疗机器人提供高精度力感知新方案
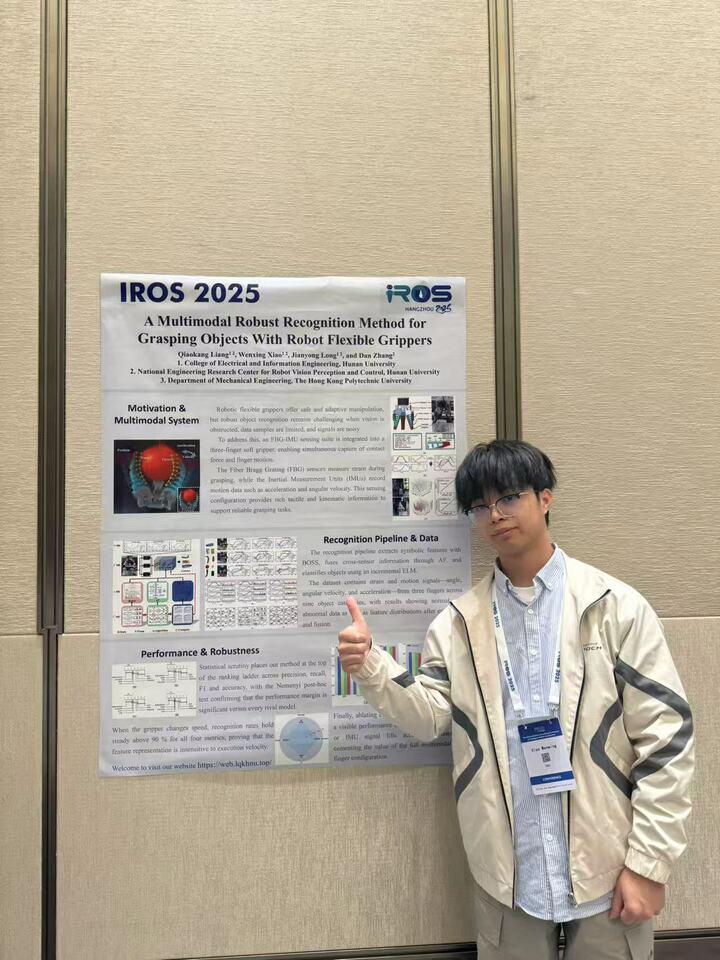
报告 2️⃣:A Multimodal Robust Recognition Method for Grasping Objects With Robot Flexible Grippers
汇报人:肖文星
🔹 核心贡献
- 🤖 构建融合力觉与运动参数的多模态识别方法
- 💪 让柔性机械手在复杂环境下稳定、鲁棒地识别不同被抓取物体
- 🚀 显著提升机器人操作的智能性与适应性

✅ 成果亮点
- 展示团队在 机器人传感、智能感知与人机交互 领域的持续创新能力
- 未来将继续探索 多模态感知与智能控制的深度融合
- 赋予机器人更加 灵巧、安全的触觉智能